Продолжение истории создания проекта для предприятия учащимися челябинского Лицея № 142. Рассказывает Сергей Безкоровайный – учитель физики и технологии лицея, руководитель робототехнического кружка.
После того как при содействии Регионального центра технического творчества учащиеся лицея посетили ЗАО «Челябинский завод дорожных машин», познакомились с работой его цехов и послушали рассказы специалистов завода о производстве, школьники решили создать свою модель мобильного робота, оказывающего вспомогательные услуги на сборке дорожных машин.
Над проектом работали ученики Вильдан Латыпов (техник-робототехник), Арсений Шахматов (инженер-робототехник) и Евгений Пронин (специалист по электроники робототехнических систем).
Исходя из основных функций робота, выявленных участниками команды, было подобрано необходимое оборудование для его создания. Выбор пал конструктор TETRIX – ввиду его функциональности и обеспечиваемой жёсткости конструкции. К тому же данный конструктор является базой для создания мобильных роботов на всемирных соревнованиях WorldSkills в компетенции «Мобильная робототехника».
В качестве контроллера ребята выбирали между LegoMindstormsEV3, ArduinoUno и myRIO кампании NationalInstruments. Выбор остановился на myRIO, так как он позволяет подключать все модули, совместимые с Arduino и Legomindstorms, а также использует графический язык программирования LabVIEW, который является промышленным языком программирования мобильных роботов.
В ходе изучения основных функций мобильного робота, было разработано несколько конструкций. Проведя ряд тестов, школьники остановились на оптимальном варианте – четырёхугольной конструкции с дифференциальным приводом и всенаправленным задним колесом.
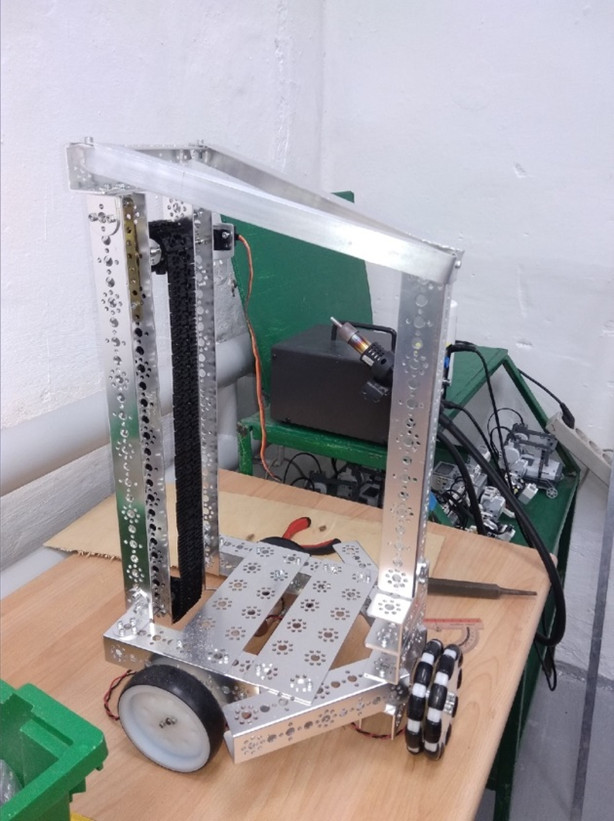
Данный вариант обеспечивает максимальную мобильность робота, благодаря дифференциальному приводу, ось вращения робота при повороте находится практически в его центре, что позволяет уменьшить вынос кузова при повороте.
В качестве манипулятора было принято решение использовать линейный актуатор с цепным конвейером. Конструкция системы манипуляции окружающими объектами обеспечивает простоту и надёжность.
Применение линейного актуатора позволило команде решить сразу несколько робототехнических проблем:
- Захват деталей и их погрузка в контейнер.
- Захват и подъём контейнера для его дальнейшей перевозки.
- Систему питания электроники было решено упаковать в кабель канал и спецобмотку. Вся электроника, включая датчики слежения за окружающей обстановкой и контроллер робота, были расположены по его периметру.
- Проводка мобильного робота
Но не все необходимые детали мог обеспечить конструктор TETRIX. Нужны были также детали для линейного актуатора и крепления для датчиков, поэтому было принято решение распечатать их на 3D-принтере. Модели для печати команда разработала в программе для 3D-моделирования «Компас-3D». Платформа для закрепления электроники была создана из фанеры.
Определившись с технологией выполнения проекта, участники команды приступили к созданию технологической карты проекта. Это позволило спланировать время работы, определить материалы и их количество, подобрать инструмент и приспособления, причём некоторые из них пришлось изготавливать самостоятельно, в ней определялась также работа по программированию робота.
В ходе решения поставленных задач, был получен следующий результат:
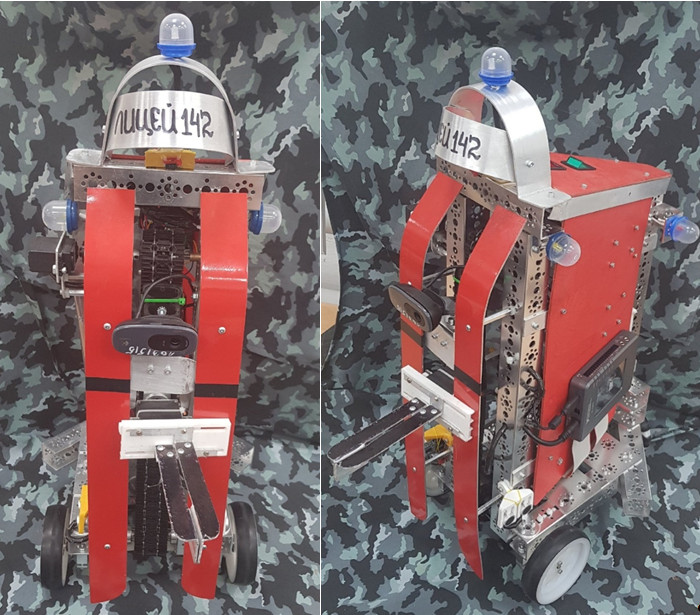
Мобильный робот, оказывающий вспомогательные услуги
на предприятии
Работая над проектом ИКаР, ребята смогли попробовать себя в роли техника-робототехника, инженера робототехника, электронщика. После соревнований ИКаР проект будет представлен на предприятии для оценки специалистами предложенных учащимися лицея решений, а также продолжит участие в других конкурсах. И уже в этом году данная модель мобильного робота заняла третье место на региональных соревнованиях WorldSkills в компетенции «Мобильная робототехника».
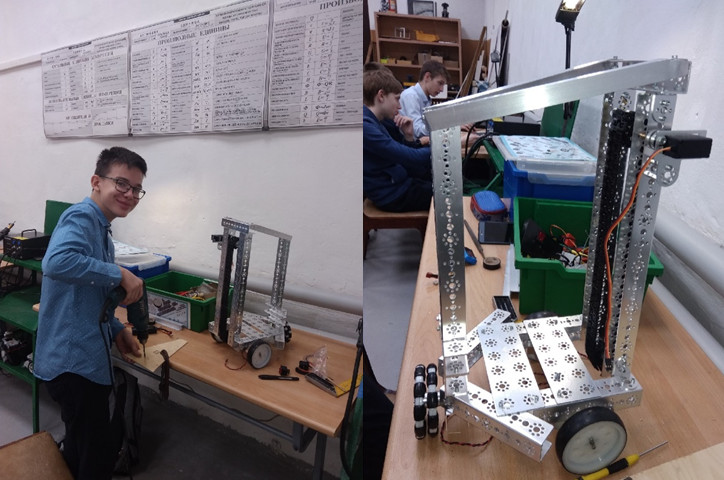
Сборка модели мобильного робота

На соревнованиях WorldSkills 2020 в компетенции мобильная робототехника